5.5.1 Rein pneumatische Gleichlaufsteuerung
Vergleiche mechanische Gleichlaufsteuerung
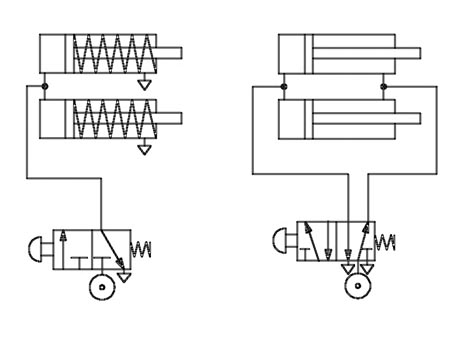
Bild 5.12Gleichlaufsteuerung einfache Bauart
Die in Bild 5.12. dargestellten Möglichkeiten werden nur angewandt, wenn kein Wert auf besondere Genauigkeit hinsichtlich der Synchronbewegung der Zylinderstangen gelegt wird. Die rein pneumatische Erreichung eines Gleichlaufes wird prinzipiell durch die Kompressibilität der Luft und durch unterschiedliche Reibungswerte in den bewegten Teilen verhindert.
Eine Verbesserung des Gleichlaufes wird in Bild 5.13 durch die Verwendung von Drosselrückschlagventilen, und durch den möglichst symmetrischen Aufbau der Schaltung erreicht.
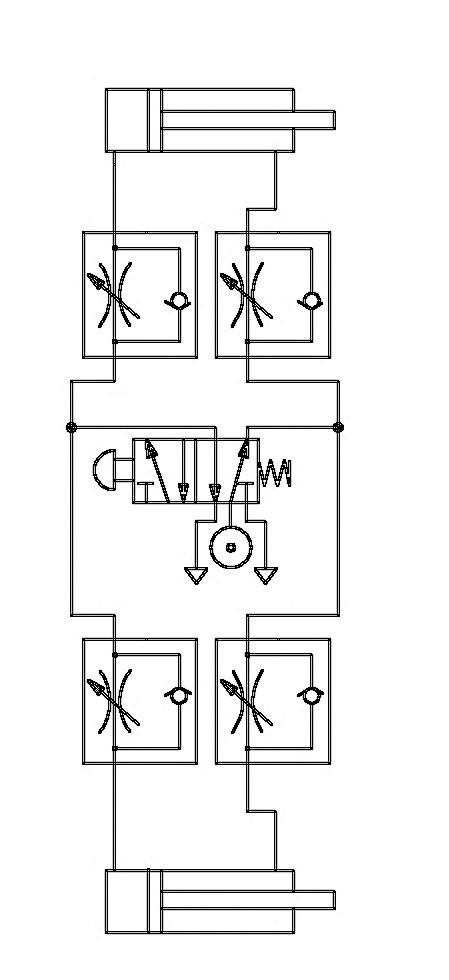
Bild 5.13
Gleichlaufschaltung mit Drosselventilen
Eventuell auftretende Lastschwankungen werden bei dieser Schaltung nicht ausgeglichen, es kommt nur zu einem Geschwindigkeitsausgleich. Diese Belastungsschwankungen haben somit einen unregelmäßigen Lauf der Zylinder zur Folge.
Des Weiteren ist die direkte Koppelung der Zylinder ein Nachteil, weil es sich ergeben kann, daß in einem Zylinder ein schnellerer Druckabbau, durch ein schnelleres Entweichen der Luft über die Drosselrückschlagventile, auftritt, und sich dieser früher bewegt als der andere Zylinder. Im Extremfall fährt ein Zylinder zunächst voll aus, während der andere sich noch kaum bewegt.
Eine etwas bessere Lösung zeigt Bild 5. 14 jeder Zylinder weist ein eigenes Steuerventil auf, die Luft kann nun über zwei Ventile entweichen, die beiden Steuerventile werden möglichst gleichzeitig geschaltet.
Auch sind die Drosselrückschlagventile für die Zylinder nicht mehr gekoppelt
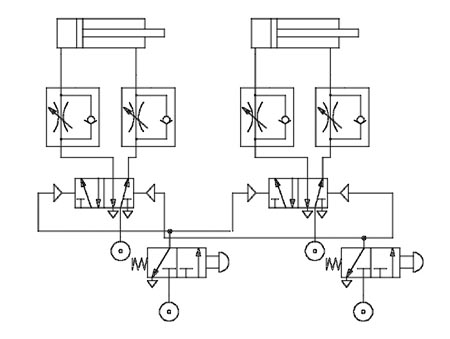
Bild 5.14
Verbesserte Gleichlaufsteueung
In dieser Anordnung kann es durch Reibung, aufgrund der Assymmetrie zu einem Umschalten von nur einem der Ventile kommen, wenn der anliegende Steuerimpuls kurz genug wird. Besser ist daher die vollsymmetrische Ausbildung nach Bild 5.15
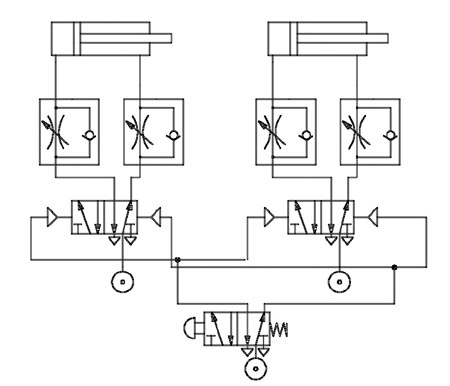 Bild 5.15
Bild 5.15
Gleichlaufsteuerung
Wie die letzten beiden Beispiele zeigen, hängt die Umsteuerzeit von den Leitungslängen ab. Je länger die Leitungen sind, bzw. je unterschiedlich lang die Leitungen zwischen den einzelnen Umsteuerventile angeordnet werden, desto länger muß das den Prozeß auslösende Hauptventil betätigt werden. Ist der Impuls zu kurz, so kann sich der Druck in der Steuerleitung nicht genügend hoch aufbauen, und im Extremfall schaltet überhaupt kein Steuerventil um.

Maschinenbau - historisch - Geschichte - Engineering - modern - Technik - Praxis