7.1 Erläuterung der Grundaufgabe
Bei entsprechender Komplexität von Schaltungen können Sperrimpulse auftreten. Sperrimpulse sind Signale, die Schaltvorgänge in unerwünschter Weise beeinträchtigen, indem sie das Umschalten eines Ventiles verhindern, obwohl ein Umschaltsignal ansteht. Ein Beispiel soll die Problematik verdeutlichen.
Ein System bestehend aus zwei Zylindern soll folgenden Bewegungsablauf verwirklichen:
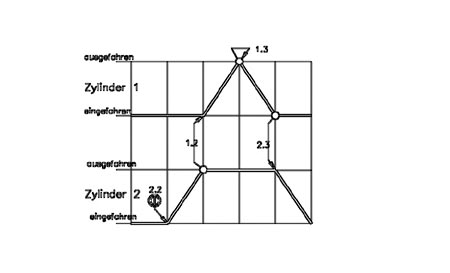
Bild 7.1 gewünschter Schaltablauf
Die Verknüpfung der beiden Zylinder erfolgt durch nachstehende Schaltung.
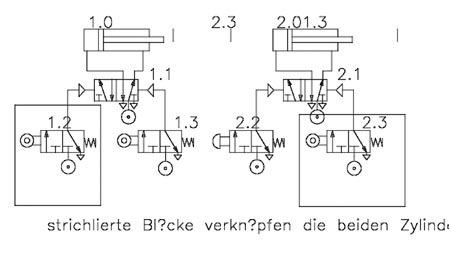
Bild 7.2 Schaltplan, wie er durch Umwandlung aus dem Logikplan entstehen würde
Alle Endschalter sind so angeordnet, daß sie die Endlagen der Zylinder kennzeichnen. Wenn der Zylinder ausgefahren oder eingefahren ist, ist der Endschalter der jeweiligen Position auf jeden Fall geschaltet. Betrachtet man Bild 7.2 so könnte die Vorrichtung nicht gestartet werden, wenn sich der Zylinder 1 in seiner „-“ Endlage ( eingefahren ) befindet. Dann nämlich blockiert das Signal des Endschalters 2.3 den Einschaltimpuls über 2.2, indem ein Umschalten des Stellgliedes 2.1 verhindert wird, weil beide Steuersignale gleich groß sind und 2.3 bereits geschalten ist.
Das gleiche Problem würde zwischen den Ventilen 1.2 und 1.3 auftreten.
Es gibt eine Reihe von Abhilfemaßnahmen. Die Einfachste findet man im Kapitel 7.2 Tastrollen mit Leerrücklauf

Maschinenbau - historisch - Geschichte - Engineering - modern - Technik - Praxis